무인비행기 드론(Drone)의 비행원리
페이지 정보
본문
창공을 가로지르는 무인항공기
생활의 날개를 달다
 최근 방송에서 자주 노출되고 있어 이제는 우리 주위에서도 어렵지 않게 만나볼 수 있는 드론은, ‘벌이 윙윙거린다’는 의미로 ‘조종사 없이 무선 전파의 유도에 의해서 비행 및 조종이 가능한 무인 항공기’를 이르는 말이다. 즉 GPS를 이용한 무인자동항법장치가 달려 있는 비행체다. 기술의 발전들로 인해 현재 산업계에서도 드론의 활용 방안을 다양하게 모색하고 있다. 이미 아마존은 드론을 통한 제품 배송 비행허가를 받기도 했으며 구글과 페이스북 또한 드론 관련 업체의 인수를 통해서 드론을 활용한 새로운 비지니스 모델 또는 기존 사업모델의 확장을 검토하고 있다.
최근 방송에서 자주 노출되고 있어 이제는 우리 주위에서도 어렵지 않게 만나볼 수 있는 드론은, ‘벌이 윙윙거린다’는 의미로 ‘조종사 없이 무선 전파의 유도에 의해서 비행 및 조종이 가능한 무인 항공기’를 이르는 말이다. 즉 GPS를 이용한 무인자동항법장치가 달려 있는 비행체다. 기술의 발전들로 인해 현재 산업계에서도 드론의 활용 방안을 다양하게 모색하고 있다. 이미 아마존은 드론을 통한 제품 배송 비행허가를 받기도 했으며 구글과 페이스북 또한 드론 관련 업체의 인수를 통해서 드론을 활용한 새로운 비지니스 모델 또는 기존 사업모델의 확장을 검토하고 있다.
드론이란 사람이 타지 않고 무선 전파의 유도에 의해 비행하는 비행기나 헬리콥터 모양의 비행체인 ‘무인항공기’를 가리키는 말이다. ‘드론(drone)’이라는 영어 낱말은 원래 벌이 내는 웅웅거리는 소리를 뜻하는데, 작은 항공기가 소리를 내며 날아다니는 모습에 이런 이름이 붙었다.
드론은 날개의 형태에 따라 고정익기, 회전익기 그리고 두 가지 방식이 혼합된 복합형으로 나뉜다. 고정익기는 사람들이 일반적으로 생각하는 보잉747 같은 비행기의 형태이다. 이 형태의 비행체는 날개가 고정되어 있다고 해서 고정익이라 불리는데, 이 고정익이 기체를 하늘로 띄우는 결정적인 역할을 한다.
흔히 '헬리콥터'로 알려져 있는 회전익기는 프로펠러라고도 불리는 로터가 회전하면서 양력을 발생시킨다. 회전익기는 어떤 형태이냐에 따라 구분이 되는데 크게 단일로터(헬리콥터), 멀티로터(콥터)로 구분할 수 있다. 프로펠러의 숫자에 따라 바이콥터(2개), 트리콥터(3개), 쿼드콥터(4개), 헥사콥터(6개), 옥토콥터(8개)로 분류한다. 이 중 근래에는 쿼드콥터가 가장 주목받고 있기에 쿼드콥터에 대해서 알아본다.
멀티콥터 비행의 기초
 [그림 1] 멀티콥터
[그림 1] 멀티콥터
멀티콥터는 2가지의 기본 원리(양력, 회전력)를 사용하여 비행한다. 헬리콥터의 경우 하나의 로터(메인 로터)가 동력장치의 회전력을 받아 회전하면서 양력을 발생시켜 상승한다. 뉴턴의 운동 제3법칙 ‘작용과 반작용의 원리’를 헬리콥터에서 볼 수 있는데 [그림 2]처럼 프로펠러가 회전하면 기체는 프로펠러가 회전하는 반대 방향으로 돌아가는 힘을 받는다. 따라서 단일로터 기체는 기체의 회전을 막기 위해 작은로터(테일로터)를 기체의 꼬리 부분에 만들어, 메인로터에 의해 생기는 회전력을 상쇄시켜야 한다.
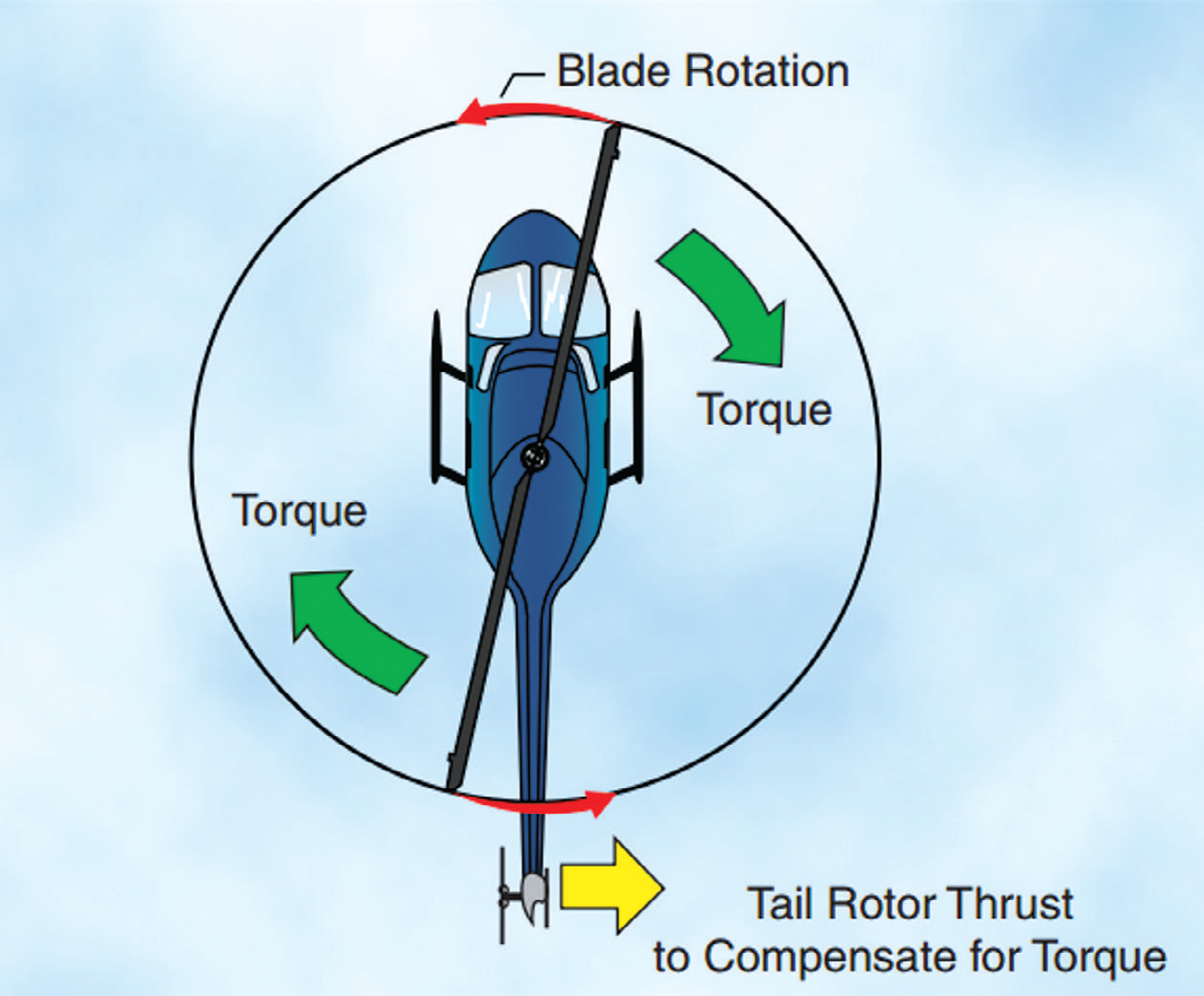 [그림2] 테일로터의 동체 회전 상쇄
[그림2] 테일로터의 동체 회전 상쇄
비행기는 가로, 세로, 수직의 3가지 운동축을 가진다. 이 세 축을 중심으로 비행기는 롤링(rolling), 피칭(pitching), 요잉(yawing)의 회전운동을 한다.
 [그림3] 3차원 공간을 표현한 직교좌표계 설명
[그림3] 3차원 공간을 표현한 직교좌표계 설명
위의 [그림 3]에서 비행기의 동체가 x축을 중심으로 회전하는 것을 롤링, y축을 중심으로 회전하는 것을 피칭, z축을 중심으로 회전하는 것을 요잉이라고 한다. 즉, 비행방향을 중심축으로 회전하는 것이 롤링(횡전), 상승 또는 하강을 위해 기수를 치켜들거나 내리는 것이 피칭, 선회를 위해 좌우 지향점을 바꾸는 것이 요잉이다. 롤링, 피칭, 요잉은 항공기의 3대 기본운동이다.
쿼드콥터의 요잉
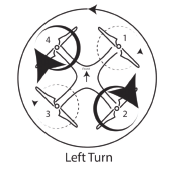
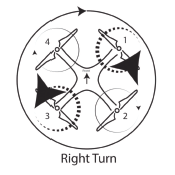
쿼드콥터는 [그림4]에서 프로펠러 1과 3은 같은 방향으로 회전하지만 2와 4는 반대 방향으로 회전한다. 2쌍씩 서로 다른 방향으로 회전하기 때문에 헬리콥터처럼 반토크를 막기 위한 꼬리날개 같은 장치를 만들 필요가 없다. [그림4]에서 2, 4의 프로펠러 회전속도가 1, 3의 프로펠러 회전속도보다 빨라지면 반작용의 균형은 무너지고 무너진 반작용의 균형은 쿼드콥터를 반시계방향으로 회전시킨다.
[그림4] 쿼드콥터 요잉
쿼드콥터의 이동
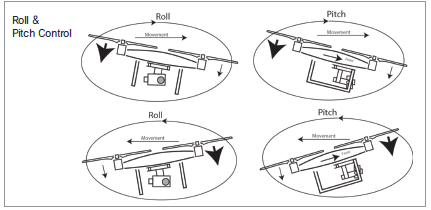 [그림 5] 피치 제어는 쿼드콥터를 전진, 후진하게 하는데 뒤쪽에 위치한 프로펠러 2개의 회전속도를 증가시키면 뒷부분이 앞부분에 비해 상대적으로 위로 들리면서 쿼드콥터를 앞쪽으로 기울게 하고, 이 자세의 기울기에 의해 앞쪽으로 진행하는 추진력이 발생되어 쿼드콥터가 전진하게 된다. 후진이나 좌‧우로의 이동도 모두 전진과 같은 원리이다. 쿼드콥터의 상승과 하강은 프로펠러를 모두 같은 속도로 빠르게 회전시키거나 느리게 회전시키면 간단히 해결된다.
[그림 5] 피치 제어는 쿼드콥터를 전진, 후진하게 하는데 뒤쪽에 위치한 프로펠러 2개의 회전속도를 증가시키면 뒷부분이 앞부분에 비해 상대적으로 위로 들리면서 쿼드콥터를 앞쪽으로 기울게 하고, 이 자세의 기울기에 의해 앞쪽으로 진행하는 추진력이 발생되어 쿼드콥터가 전진하게 된다. 후진이나 좌‧우로의 이동도 모두 전진과 같은 원리이다. 쿼드콥터의 상승과 하강은 프로펠러를 모두 같은 속도로 빠르게 회전시키거나 느리게 회전시키면 간단히 해결된다.
[그림5] 쿼드콥터 롤, 피치 제어
멀티콥터 피드백 제어
멀티콥터는 자이로, 가속도 등의 센서와 조종자 명령의 입력으로 모터를 제어할 때 피드백 제어를 한다. 피드백 시스템은 제어하고자 하는 대상의 출력값(output)을 측정하여 이를 원하고자 하는 참조값(reference value) 혹은 설정값(setpoint)과 비교하여 오차(error)를 계산하고, 이 오차값을 이용하여 제어에 필요한 제어값을 계산하는 구조로 되어 있다.
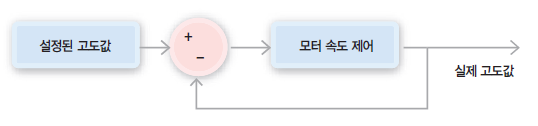
위의 그림에서 멀티콥터의 고도가 원하는 고도보다 낮으면 설정된 고도값과 실제 고도값의 차이는 플러스가 될 것이고 모터 회전 속도를 증가시켜서 멀티콥터를 상승시킨다.
멀티콥터는 기체 구조가 대칭적이어서 각 프로펠러의 속도제어만으로 충분히 방향 전환이 가능해 헬리콥터보다 구조적으로 휠씬 단순하다. 또한 기체 자체를 제어하기가 쉬워 누구나 날리기 편하고 다양한 용도의 사용이 가능하다.
멀티콥터가 최근에 여러 분야에서 사용이 가능해진 것은 2000년 이후에 멀티콥터에 사용되는 부품이나 전자소자들이 작아지고 가격이 낮아졌기 때문이다. 멀티콥터를 안정적으로 비행하기 위해서 각각의 모터 회전속도를 제어하는 것은 조종자가 할 수 없고 자이로, 가속도 등의 센서와 컴퓨터(비행 제어 보드)가 있기 때문이다.
 글 | 정영진 대표(온누리넷)
글 | 정영진 대표(온누리넷)
정영진 대표는 인하대학교 전자공학과를 졸업했다. 현재 (주)온누리넷 대표이사로 맡고 있으며. 드론코리아.com 사이트를 운영하고 있다. 드론을 이용한 학습 자료를 개발, 인천시학생교육원 외래 강사로 활동하는 한편, 드론을 활용한 STEM 프로그램 개발에도 많은 관심을 보이고 있다.